Our latest work on fault detection in a mechatronic switch has been published in the Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit. The title of the paper is “Fault-tolerant control for sensor faults affecting an electromechanical railway track switch” and is freely available to read and download. We did this work as part of the REPOINT project.
Paper Overview (TL;DR)
We used Kalman filters and residuals to determine whether there was a problem with the REPOINT mechatronic switch for railways. After prototyping this in simulation, we found that it worked. Then, we applied this to a scale model of a mechatronic switch to check if it worked there too. And it did!
Motivation
Most railway switches (or points) are purely mechanical and use super-old technology to switch between tracks. This would be fine, except that they are the #1 cause of delay minutes on the UK rail network! The REPOINT project aimed to reduce these failures by replacing these with mechatronic switches that had in-built sensors and which were easily lineside replaceable.
But, it wasn’t clear how these mechatronic switches would deal with a sensor failure. Or how it might recover from one.
Mechatronic Switch Simulation
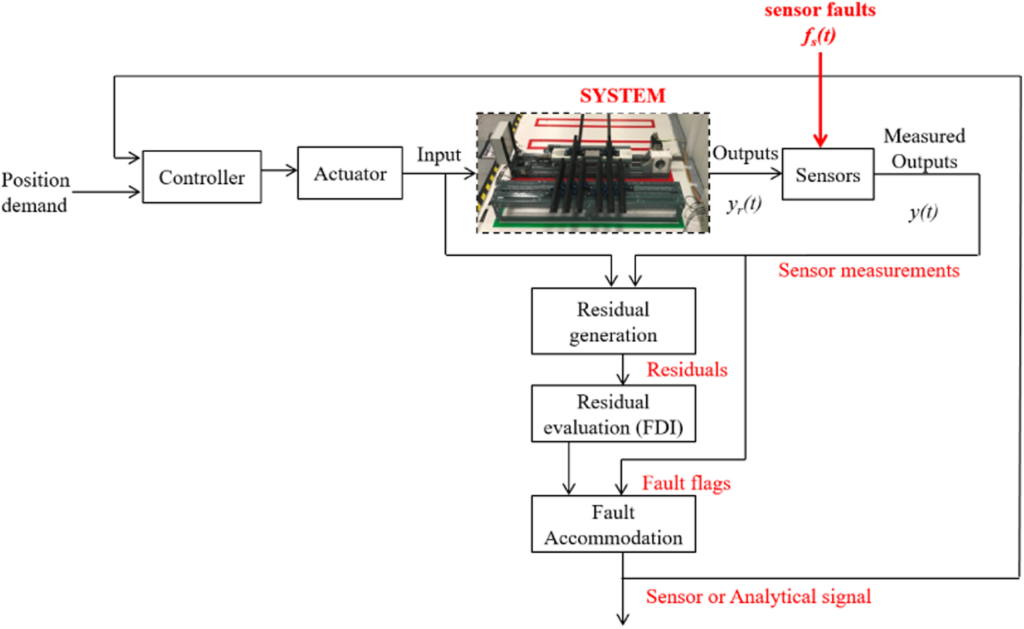
We focussed on disconnect failures, where one of the signals (either position or velocity) was disconnected from the controller. To see what effect this would have, we first built a software simulation of the mechatronic switch.
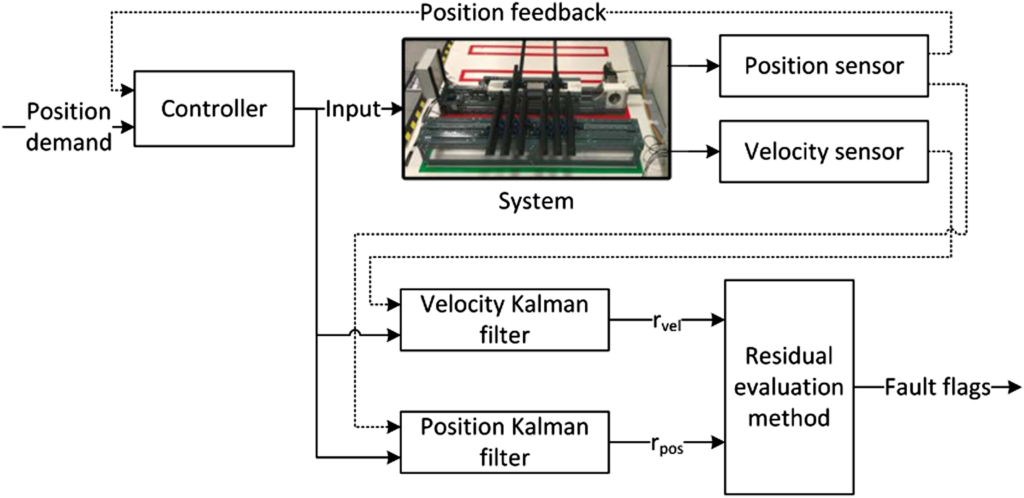
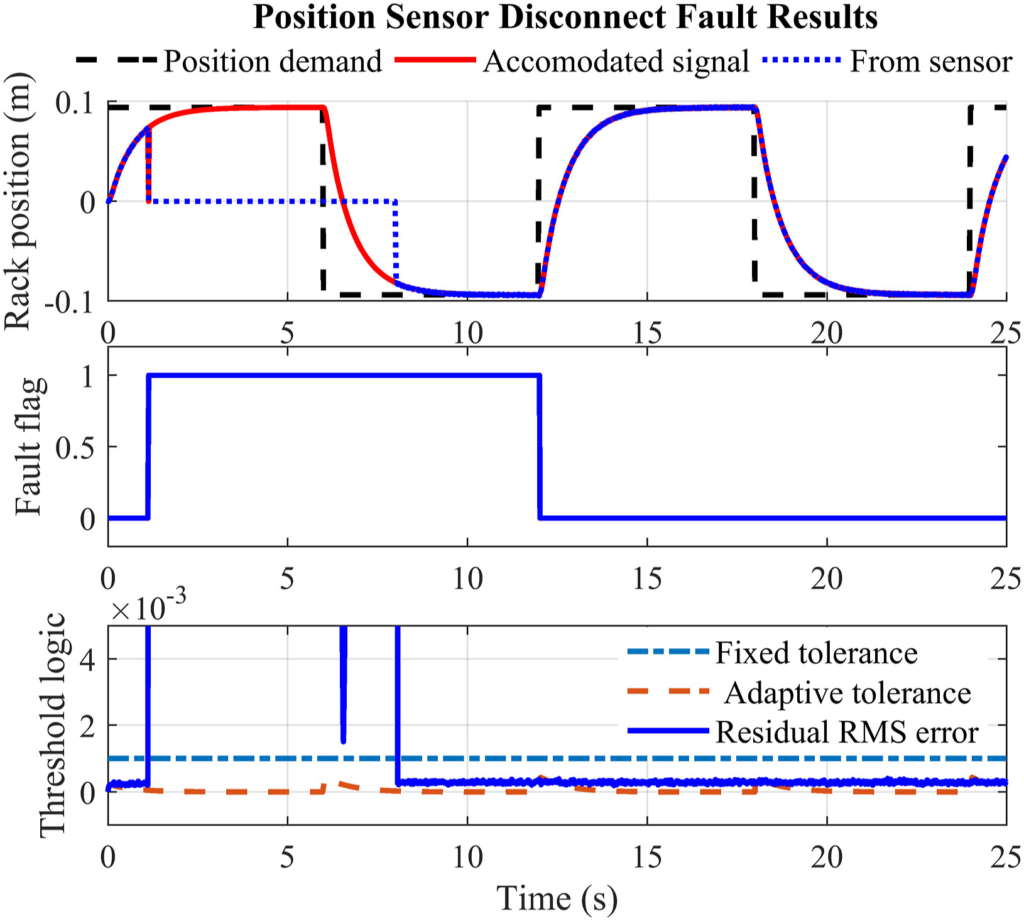
Then, we used the Kalman filters to estimate what the states of the system should have been. In the figure below, you can see that the signal from the sensor (in blue dashes) drops to zero, but the filter’s estimate of the signal (in red) tracks correctly. That’s pretty cool!
The Real Deal
(AKA: The Real Mechatronic Switch)
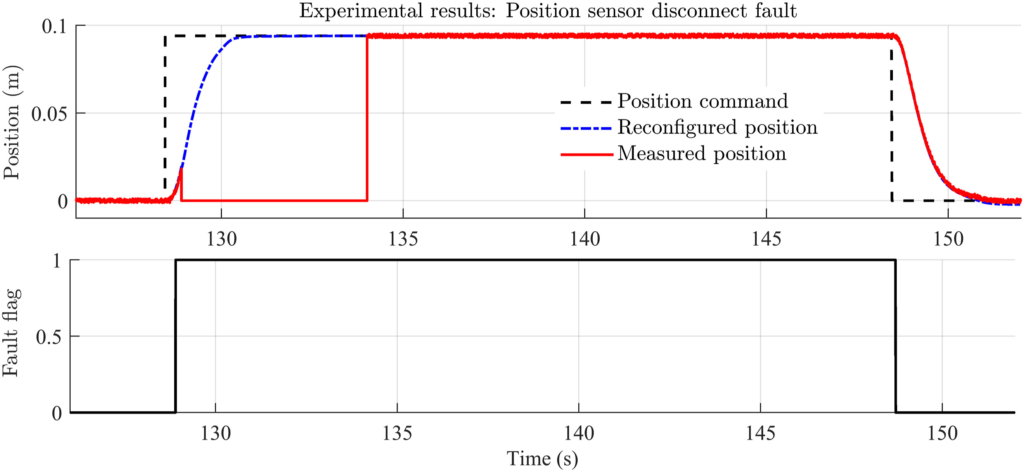
Then, we took this scheme and applied it to our small-scale model of the REPOINT switch:
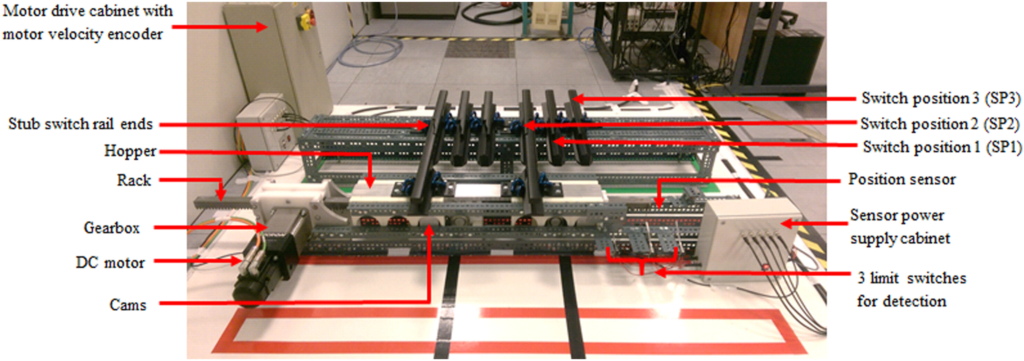
Long story short – it worked! When we used some logic to determine when to trust the Kalman filters over the sensor signals, the system was able to continue to work when the position or velocity sensors were disconnected. (This approach uses thresholding of the residuals – more information is available in the paper.)
Conclusions
It worked! Using Kalman filters and residual logic, we were able to ensure the switch could continue working even if one of the sensors failed. Pretty neat eh!
Acknowledgements to Dr Precious Kaijuka Mwongera who did the experimental work for this paper!
You can read the whole paper online, for free if you want more information.
If you want more information on my recent papers, you can check out the summary of our work on torque ripple control and systems engineering for waste management.